Comparing NATS and gRPC: Understanding the Differences

Introduction
In the modern landscape of distributed systems and microservices, messaging platforms play a crucial role in facilitating communication among various services and components. Two adopted messaging frameworks in this context are NATS and gRPC. In this article we will compare these frameworks and outline their distinctions.

NATS – The Cloud Native Messaging System
NATS is an open-source messaging system framework that relies on TCP connections and the NATS protocol. This is a text-based custom protocol that primarily uses a publish-subscribe model to distribute messages between different services. In this model, a publisher sends a message on a subject, and any active subscriber listening to that subject receives the message. NATS often used in cloud native and microservice environments where scale, performance and persistence are critical factors.
NATS consists of different components in its ecosystem including,
- NATS server – This is the core and often known as message broker.
- NATS streaming server – This was deprecated and now you can use NATS Jetstream to have the same functionality.
- NATS Jetstream – This is designed to provide advanced stream processing capabilities.
- NATS clients – This handles communication between the application and NATS servers.
- NATS connectors and bridges – These are often used to connect NATS to external messaging systems, databases, or streaming services.
- NATS operators and tools: These are for operating and managing NATS clusters.

gRPC Messaging Framework
gRPC (gRPC Remote Procedural Call) is an open-source messaging framework designed to provide highly efficient and high-performance data transmission. It is built on top of the HTTP 2.0 protocol and uses the Protocol Buffers data serialization format for efficient data exchange. You can relate it as a communication protocol that is used in place of REST to call functions between a client and a server. The client and the server can be microservices, mobile applications, or CLI tools.
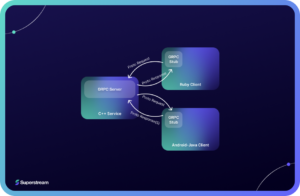
For a gRPC set up to work, there has to be a client and a server. The client will make a proto request to the server and the server responds with a proto response.
gRPC uses HTTP 2.0 which is a faster than HTTP 1.1 that REST depends on. HTTP 2.0 enforces a binary format by default. This means protocols using HTTP 2.0 need to serialize their data to binary before sending requests over the network. gRPC uses Protobuf, a binary serialization format, for defining data schema.
gRPC also supports data streaming which allows a single request to return a lot more data than it would typically be in the case of REST. This data streaming can either be a server to client streaming or bi-direction streaming between client to server. Note that the service called the client is the service that makes the initial request while the server is the service that sends the response.
Advantages of NATS and gRPC
The advantages of using NATS include:
- Simplicity and Lightweight: NATS is designed to be simple and lightweight, making it easy to understand, set up, and integrate into applications. It has a minimalistic approach, which can be advantageous for projects where a lightweight messaging system is preferred over the more complex RPC framework like gRPC.
- Publish-Subscribe Model: NATS follows a publish-subscribe messaging pattern, enabling clients to subscribe to specific subjects and efficiently receive messages broadcasted to those channels. This makes it well-suited for scenarios where a single message needs to be sent to multiple consumers or where events need to be distributed to interested parties.
- Loosely Coupled Systems: NATS is often used for building loosely coupled systems, where different components or services can communicate asynchronously through pub/sub channels. This decoupling enables scalability and flexibility in system design.
- Flexibility in Messaging Patterns: In addition to the publish-subscribe model, NATS also supports request-reply messaging, which can be useful for synchronous communication between components. This flexibility allows developers to choose the most appropriate messaging pattern for their specific use cases.
- High Performance: NATS is known for its high performance and low latency. It achieves this through its lightweight protocol and efficient message routing mechanisms. For scenarios where low latency and high throughput are crucial, NATS can be a preferred choice.
- More agnostic with the data format: NATS users are free to serialize their message payload using JSON, XML, Protocol Buffers, or any other format according to their needs where gRPC is more tightly coupled with Protocol Buffers for efficient, type-safe data exchange.
- NATS is great for rapid message exchange within a bounded context of services because it’s built for commiunicating fast in private networks (trust-anchored security model among interconnected services).
The advantages of using gRPC include:
- RPC-based Communication: gRPC is built specifically for RPC (Remote Procedure Call) communication between client and server applications. It provides a structured and strongly-typed way to define services and messages using Protocol Buffers. This makes it easier to define APIs, invoke methods, and handle structured communication between components.
- Bidirectional Streaming: gRPC supports bidirectional streaming, enabling both clients and servers to send multiple messages over a single RPC connection. This feature is useful for scenarios where real-time or continuous data streaming is required, allowing efficient and low-latency communication between components.
- Payload Serialization with Protocol Buffers: gRPC uses Protocol Buffers (protobufs) as its default payload serialization mechanism. Protobufs offer efficient binary serialization, schema evolution, and language-agnostic support. They provide a compact payload size, improved performance, and support for evolving the message structure over time without breaking compatibility.
- Service Discovery and Load Balancing:gRPC provides built-in support for service discovery and load balancing. It offers features like DNS-based service discovery and integrated load balancing policies. These capabilities simplify the deployment and management of distributed systems by automatically routing requests to available instances and handling failover.
- gRPC excels when you need a secure way for services to communicate with both internally and with external services. Its design facilitates strong security practices for private inter-service messaging within a microservices architecture, while also providing the necessary safeguards for secure, public-facing service communication.
Tabular Comparison of the Differences Between NATS and gRPC
|
|
NATS | gRPC |
|
Persistence |
No message persistence in NATS. Persistence achieved with JetStream. | gRPC calls are not persisted to disk. |
|
Messaging patterns and models |
Publish-Subscribe, Request-Response. | Unary, bi-directional streaming. |
|
Payload Serialization |
NATS supports plain text or JSON payload serialization. | gRPC uses Protocol Buffers (protobufs) as its default payload serialization mechanism. Protobufs offer efficient binary serialization, schema evolution, and language-agnostic support. |
|
Stream buffering |
Can buffer streaming data. | Does not buffer streaming data. |
|
Deployment methods |
NATS can be deployed using Docker, Kubernetes, Package Manager, Release Zip and Development Build. | gRPC works at the runtime layer of the software stack and can be deployed anywhere. |
|
Authentication methods |
NATS makes use of different authentication mechanisms such as token authentication, username/password combination, TLS, etc. | gRPC supports a variety of authentication mechanisms such as SSL/TLS, ALTS, and token-based auth. |
|
Supported languages |
Official clients are available in Go, Rust, JavaScript, TypeScript, Python, Java, C#, C, Ruby and Elixir, in addition to 30+ community-contributed clients. | gRPC support common used languages including C# / .NET, C++, Dart, Go, Java, Kotlin, Node, Objective-C, PHP, Python and Ruby. |
Use Cases for NATS and gRPC
Determining the optimal system depends on our specific use case. In general, NATS is well-suited for real-time data streaming and IoT applications, whereas gRPC is ideal for building performant and scalable microservices.
Real-World Examples of NATS Implementations
- Microservices communication: NATS is a perfect fit for communication between microservices, as it provides a lightweight and efficient messaging solution that scales well.
- IoT applications: NATS is an ideal messaging solution for IoT applications because it provides low latency and high performance, which are crucial for real-time data processing and analytics.
- Cloud-native applications: NATS is cloud-native, and it is easy to use it with Kubernetes, Cloud Foundry, and other cloud-native platforms.
- Finance: NATS is a great choice for financial applications because it provides fast, reliable, and secure messaging between financial institutions, stock exchanges, and traders.
- NATS is ideal for use cases that involve real-time data streaming, sensor data aggregation, and telemetry processing. It is also well-suited for cloud-native and microservices architectures where scalability, performance, and flexibility are critical factors.
Real-World Examples of gRPC Implementations
- Microservices architecture: Microservices architecture is rapidly becoming popular, and gRPC is an ideal technology to use for inter-service communication. With gRPC, the services communicate using strongly typed message definitions that make it easier to maintain, test, and debug.
- Cloud-native applications: gRPC is a cloud-native technology that is designed to work well with modern cloud architectures, such as Kubernetes, Docker, and Istio. These technologies are used to build, deploy, and manage microservices applications in the cloud.
- Machine learning: gRPC is also becoming increasingly popular in machine learning applications, where it is used to distribute machine learning models across different clusters.
- gRPC is ideal for use cases that require a high level of performance, low latency, and high throughput. It is particularly well-suited for building APIs and microservices that communicate with each other.
While we discuss NATS and gRPC it’s also essential to understand this domain of inter-service communication is not static and will continue to evolve with emerging technologies. There are NATS alternatives like Kafka, RabbitMQ, and gRPc alternatives like REST, and GraphQL. Moreover, the rise of serverless architectures and event-driven applications is fostering new communication patterns and demands.
Conclusion
The choice between NATS and gRPC depends on the specific requirements and characteristics of your project. It depends on factors as messaging requirements, scalability needs, interoperability concerns, and the nature of your application. It’s essential to evaluate these factors against the specific use case and goals of your project to make an informed decision.
As these technologies keep changing, we’re going to see them get better at keeping data safe, talking to each other more easily, and being more flexible. This means people making decisions on these tools need to stay sharp, making sure they’re using the right tool for the job in this ever-changing tech space.